
Magnetic micro-actuator based on particle jamming
(Khalil from Prof. Ya-Ping Hsieh’s group)
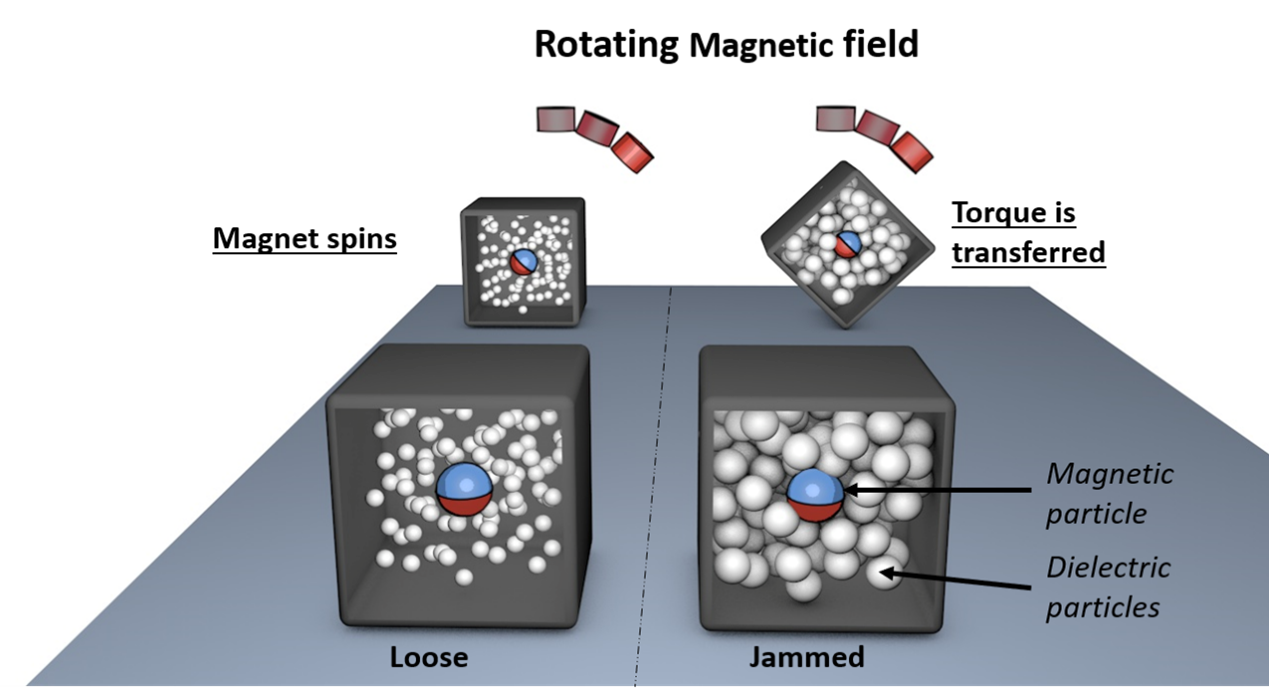
Magnetic microactuators and microrobots have the potential to revolutionize remote manipulation and swarm-based collaboration. Unfortunately, conventional approaches to controlling individual magnetic systems cannot be shrunk to the microscale due to fundamental challenges in the generation and modification of magnetic fields. We here demonstrate a novel actuation mechanism that imparts magnetic microactuators with unprecedented ease of fabrication and dimensional scaling. Through mechanical jamming in binary particle mixtures, magnetic ordering and pronounced anisotropy could be induced. Combined simulation and experimental investigation confirm the importance of arresting forces from neighboring particles as the origin of this behavior. This sensitivity of magnetic properties on assembly morphology can be exploited to produce novel actuators that utilize minute changes in particle size or pressure. We demonstrate the transduction of particle swelling into magnetic torque locking that enables active magnetic control in microrobots for future remote operating applications. (This work has been published in ACS Materials Letters 6,10.4c01157(2024))